Induktivität
| Physikalische Größe | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Name | Elektrische Induktivität | |||||||||
| Formelzeichen der Größe | ||||||||||
| ||||||||||


Die Induktivität, auch Eigeninduktivität, Selbstinduktivität oder Selbstinduktion genannt, ist eine elektrische Eigenschaft eines stromdurchflossenen Leiters oder anderen Bauteils, aufgrund einer Änderung des elektrischen Stromes und damit des magnetischen Feldes eine Gegenspannung (Elektromotorische Kraft) zu induzieren, welche ebendieser Stromänderung entgegenwirkt. Sie ergibt sich aus dem Verhältnis des durch den stromdurchflossenen Leiter erzeugten verketteten magnetischen Flusses Ψ und der Stromstärke, die gerade diesen Fluss 'selbst' erzeugt:
- .
Umfasst der Leiter den gleichen magnetischen Fluss Φ mehrfach, z.B. alle Windungen einer Spule N mit gleicher Größe, ergibt sich für den verketteten magnetische Fluss der Spezialfall NΦ und die Selbstinduktivität zu
- .
Eine Wirkung der Eigeninduktivität ist z. B. die Selbstinduktionsspannung entlang der Leiterschleife, wenn sich der durchfließende Strom im felderregten Leiter ändert. Des Weiteren wird zwischen innerer und äußerer Induktivität unterschieden.
Zweipole und elektrische Verbraucher werden als induktiv bezeichnet, wenn ein sie durchfließender, zeitlich veränderlicher Strom über deren Klemmen eine zur Änderungsgeschwindigkeit proportionale Spannung hervorruft. Andere verwandte Anwendungsgebiete, in denen die Induktivität eine indirekte Rolle spielt, sind elektrische Maschinen wie beispielsweise Transformatoren oder Elektromotoren.
Definition
Wenn ausschließlich magnetische Stoffe mit einer konstanten Permeabilitätszahl in der Umgebung des Stromkreises vorhanden sind, dann folgt aus dem Durchflutungsgesetz, dass die magnetische Flussdichte B dem Strom I in einer Leiterschleife proportional ist. Daher ist auch der insgesamt vom Strom I erzeugte magnetische Fluss Φ direkt proportional dem Momentanwert der Stromstärke i. Der dabei auftretende Proportionalitätsfaktor bei N Windungen wird als Induktivität L (wahrscheinlich in Honoration zu Emil Lenz) bezeichnet:
- .
Die Maßeinheit für die Induktivität ist im SI-Einheitensystem das Henry, benannt nach dem US-amerikanischen Physiker Joseph Henry. Abgekürzt wird die Einheit mit H.
Betragsmäßig liegt eine Induktivität von 1 H dann vor, wenn bei gleichförmiger Stromänderung von einem Ampere in einer Sekunde eine Selbstinduktionsspannung von einem Volt entlang des Leiters entsteht.
Anmerkung: Weisen die magnetischen Stoffe wie Eisen in der Nähe des elektrischen Leiters keine konstante Permeabilitätszahl μr auf (diese ist beispielsweise von der magnetischen Flussdichte B abhängig), dann ist die Induktivität kein konstanter Proportionalitätsfaktor sondern eine Funktion der magnetischen Flussdichte. Dies wird auch als Sättigungsmagnetisierung bezeichnet. Es ergeben sich nichtlineare Induktivitäten, die analytisch wesentlich schwieriger zu behandeln sind.
Wird eine nichtlineare Induktivität um einen Arbeitspunkt herum ausgesteuert, so kann die Änderung des verketteten Flusses in Bezug zur Änderung des Stroms vom Wert der statischen Induktivität abweichen. Für infinitesimal kleine Änderungen um den Arbeitspunkt ergibt sich aus dem Anstieg der Tangente an die Kurve die dynamische Induktivität
- .
Veraltete Einheit
Bis Mitte des 20. Jahrhunderts wurde die Induktivität von Spulen manchmal mit der Einheit ‚cm‘ beschriftet. Diese Angabe in Zentimetern rührt daher, dass die Induktivität im heute praktisch kaum noch gebrauchten elektromagnetischen CGS-Einheitensystem in der Längendimension ausgedrückt wird.
Eine Induktivität von 1 cm in elektromagnetischen CGS-Einheiten entspricht 1 nH in SI-Einheiten.
Induktion
Dem Induktionsgesetz entsprechend ergibt sich die Umlaufspannung ui einer ruhenden um den magnetischen Fluss geführten Schleife aus der zeitlichen Änderungsrate des durch diese Schleife hindurchtretenden magnetischen Flusses bzw. aus der induzierten elektrischen Feldstärke Ei entlang der Schleife:
- .
Wenn die Leiterschleife den magnetischen Fluss N-fach umschlingt, wie dies beispielsweise bei einer Spule der Fall ist, gilt näherungsweise:
- .
Das dabei auftretende negative Vorzeichen leitet sich direkt aus den Maxwellgleichungen (Induktionsgesetz), bzw. der Lenzschen Regel, ab und beruht auf der Konvention, dass das magnetische Feld rechtshändig zum Integrationsweg und zum elektrischen Feld steht.
Die induzierte Spannung ist eine Quellspannung, die einen Strom anzutreiben sucht, der der ursprünglichen Stromänderung entgegenwirkt. Werden Strom und Spannung für die Induktivität als passives Bauelement in die gleiche Richtung definiert, ergibt sich für u: . Mit der obigen Definition der Induktivität lässt sich die Beziehung von der Klemmspannung u als Funktion des Stromes i als Differentialgleichung ausdrücken:
In den meisten Fällen ändert sich die Induktivität nicht zeitlich und die Strom-Spannungsbeziehung an der Induktivität kann angegeben werden zu
Der dabei auftretende magnetische Fluss ist jener Fluss, der erst aufgrund des Stroms i durch die Leiterschleifen erzeugt wird. Eine Änderung dieses Flusses induziert in jeder der N Leiterschleifen eine Spannung und wird damit als verketteter magnetischer Fluss wirksam. Weitere externe magnetische Flüsse durch die Leiterschleifen sind in diesem Fall als nicht vorhanden angenommen bzw. zeitlich konstant. Die Spannung u nennt man die bei Selbstinduktion auftretende Klemmenspannung.

Das Vorzeichen in obiger Gleichung ist abhängig von der Zählrichtung von Strom und Spannung. Stimmt die Richtung der Spannung u mit der Richtung des Stromes entlang der Leiterschleife überein, wie in nebenstehender Grafik dargestellt, spricht man vom so genannten Verbraucherzählsystem, und es gilt:
- .
Sind die Richtungen von Spannung u Strom i entlang der Leiterschleife entgegengesetzt gerichtet, spricht man vom so genannten Erzeugerzählpfeilsystem, und es gilt:
- .
Man bezeichnet diesen bei Stromänderung entstehenden Spannungsabfall u dann als Selbstinduktionsspannung oder induktiven Spannungsabfall. Die obige Differentialgleichung ist die Elementgleichung, mit der sich lineare Induktivitäten, wie beispielsweise Spulen in elektrischen Schaltungen, beschreiben lassen.
Netzwerkmodell
Ausgehend vom Induktionsgesetz, erzeugen extern einwirkende, zeitlich veränderliche magnetische Flüsse in zeitlich konstanten Leiterschleifen zeitlich veränderliche elektrische Spannungen. Aber auch der magnetische Fluss, der durch einen Strom durch die Spule selbst entsteht, wirkt auf die Spule ein. Ändert sich die Stromstärke durch die Spule, so ändert sich das von ihr selbst erzeugte Magnetfeld und induziert dadurch in der Spule selbst eine Spannung, die der Stromstärkeänderung entgegen gerichtet ist. Dieser Umstand wird allgemein als Selbstinduktion bezeichnet. Je schneller und stärker sich das Magnetfeld ändert, desto höher ist die erzeugte Induktionsspannung. Grundsätzlich kann die Selbstinduktion vollständig durch das Induktionsgesetz beschrieben werden und erfordert keine formalen Ergänzungen oder Anpassungen.
Allerdings kommt es bei der in Elektrotechnik üblichen Netzwerktheorie, welche beispielsweise zur Beschreibung von elektrischen Maschinen wie Transformatoren Verwendung findet, unter Umständen zu Verständnisschwierigkeiten, da die Netzwerktheorie keine Feldgrößen wie den magnetischen Fluss kennt.


Stattdessen wird mit zeitlich veränderlichen Spannungen und Strömen in Ersatzschaltbildern mit passiven Bauelementen wie Spulen und elektrischen Widerständen gearbeitet. Die induzierten Spannungen werden als Spannungsquellen modelliert, welche historisch auch als elektromotorische Kraft (EMK) bezeichnet werden. Da es sich bei induzierten Spannungen aber um keine Kraft im physikalischen Sinn handelt, sollte der Begriff EMK zur Vermeidung von Missverständnissen vermieden werden und als selbstinduzierte Quellenspannung bezeichnet werden.
Im Netzwerkmodell, wie sie unter anderem Schaltpläne darstellen, wird mit Zählpfeilen und bestimmten Orientierungen gearbeitet, wie es die nebenstehende Abbildung darstellt. Zur Verdeutlichung ist der von extern auf die Leiterschleife einwirkende magnetische Fluss Φext und die davon verursachten induzierten Spannungen uext mit dem Index ext versehen. Bei Belastung der extern geschlossenen Schleife fließende Strom i erzeugt einen magnetischen Fluss ΦI, welcher mit dem Index I kennzeichnet ist. Die selbstinduzierte Quellenspannung lässt sich als eine Spannungsquelle mit dem Betrag ui modellieren, wie in erster Abbildung dargestellt, und ist der dem Spulenstrom i treibenden Spannung uext entgegengerichtet. Man bezeichnet sie daher auch als Gegenspannung. Anwendung findet diese Darstellung beispielsweise bei der Beschreibung des so genannten Magnetisierungsstromes bei einem Transformator.
Das Modell des induktiven Spannungsabfalles, wie in zweiter Abbildung dargestellt, kommt ohne weitere Spannungsquelle aus. Die an der eingezeichneten Spule L auftretende Spannung weist dabei in die gleiche Richtung wie der Strom i welcher durch die von extern treibenden Spannung uext verursacht ist. Diese Darstellung hat den Vorteil, dass die Zusammenhänge im Netzwerkmodell bei harmonischen Vorgängen durch das Ohmsche Gesetz mit Blindwiderständen einfacher beschrieben werden können. Der in der Elektrotechnik wichtige Spezialfall von harmonischen Vorgängen bei den auftretenden Größen reduziert die zeitlichen Ableitungen im Induktionsgesetz auf Multiplikationen mit jω (dΦ/dt ≡ jωΦ), was in der komplexen Ebene einer Drehung um 90° entspricht und den Zugang zur komplexen Wechselstromrechnung darstellt. Hierbei bezeichnet die imaginäre Einheit.
Induktiver Blindwiderstand
Transformiert man die Differenzialgleichung:
in den Laplace-Bereich mit der unabhängigen Variablen , so wird aus dem Differentialoperator der Faktor , und es gilt:
- .
Das Zeichen bezeichnet die Kreisfrequenz . Ähnlich wie beim Ohmschen Gesetz lässt sich für die Spule daraus ein Wechselstromwiderstand:
definieren, der auch als (komplexe) Impedanz bezeichnet wird.
Wird, z.B. für sehr einfache Schaltungen, die Phasenverschiebung zwischen Strom und Spannung an der Induktivität nicht betrachtet, kann man Wechselstromrechnungen auch ohne komplexe Zahlen durchführen. Wird eine Induktivität an eine Wechselspannung vom Betrag U gelegt, kann der Betrag I des Stroms nach der Formel:
berechnet werden, wobei für den induktiven Blindwiderstand XL bei der Frequenz f gilt:
- .
- Spannungs- und Stromverlauf
-
 Luftspule
Luftspule -
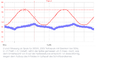 Spule mit Eisenkern
Spule mit Eisenkern


Dies gilt jedoch nur für Induktivitäten die eine konstante und nicht von der Aussteuerung abhängig Permeabilitätszahl haben, wie es zum Beispiel bei einer Luftspule der Fall ist.
Der Leerlaufstrom von Luftspulen kann um weniger als 90 Grad phasenverschoben zur Spannung sein. Bei der geringen Frequenz von 50 Hz in der Beispielmessung ist der Ohmsche Widerstand dominant. Der Leerlaufstrom von Spulen mit Eisenkern verläuft, bedingt durch dessen Hysteresekurve, gänzlich anders als bei einer Luftspule.
Selbstinduktion, Anwendungen
Die Selbstinduktion wird unter anderem genutzt, um die erforderliche hohe Zündspannung bei Leuchtstofflampen oder für Zündkerzen im Ottomotor zu erzeugen. Es lassen sich Spannungen von einigen 1000 V erzeugen. Im Elektrozaun und im Funkeninduktor werden auf diese Weise Hochspannungsimpulse erzeugt.
Das Schalten jeder Induktivität stellt für Schalter eine Belastung dar. Die dabei entstehende hohe Spannung ist für Schalter, insbesondere elektronische Schalter wie Transistoren, gefährlich, denn beim Ausschalten ändert sich das Magnetfeld sehr abrupt und erzeugt damit die hohe Selbstinduktionsspannung. Um die Zerstörung des Schalters zu vermeiden oder die Spannung zu begrenzen, wird ein Kondensator oder eine Freilaufdiode antiparallel zur Spule geschaltet.
Die Selbstinduktion ist unter anderem auch der Grund für die Größe der Induktivität, welche für das Verhalten der Spule in Wechselstromkreisen benötigt wird. Bei sinusförmigem Verlauf der Größen führt sie zu einer Phasenverschiebung zwischen Strom und Spannung, was im Rahmen der komplexen Wechselstromrechnung bei der Berechnung von induktiven Widerständen Anwendung findet.
Induktivitätsbestimmung verschiedener Leiteranordnungen
Durch Anwendung der Berechnungsmethoden für magnetische Felder, insbesondere des Biot-Savart-Gesetzes, lassen sich für einige einfache geometrische Leiteranordnungen die äußeren Induktivitäten analytisch bestimmen. Kompliziertere Leiteranordnungen sind in der Feldberechnung meist nur noch mittels numerischer Berechnungsverfahren zugänglich.
Die im Folgenden näher dargestellten Leiteranordnungen haben auch technische Bedeutung, mit dem Ziel, elektrische Bauteile mit definierter und bekannter Induktivität herzustellen. Diese Bauelemente werden Spulen oder Drosseln genannt.
Induktivität einer Ringspule

Eine Ringspule, auch als Toroidspule bezeichnet, besteht aus einem Ring mit dem mittleren Radius r und Querschnittsfläche A aus einem magnetisch gut leitfähigen Material mit hoher relativer Permeabilitätszahl µr, wie beispielsweise einem Ferrit gebildet. Die dabei auftretende Naturkonstante µ0 ist die magnetische Feldkonstante.
Dieser ringförmige Kern wird mit einem dünnen Draht mit N Windungen bewickelt. Die Induktivität L ist dann in Näherung gegeben in der Form:
- .
Eine bessere Näherung für die Induktivität einer Ringspule, welche die Abhängigkeit der magnetischen Feldstärke als Funktion des Radius beachtet, lautet:
- .
Dabei wird ein rechteckförmiger Querschnitt des Ringes mit der Höhe h angenommen. Der äußere Radius des Kerns ist mit R und der Innenradius mit r bezeichnet.
In allen Fällen gilt, dass diese Gleichungen nur bei hinreichend dünnem Draht gute Näherungsergebnisse liefern.
Induktivität einer Zylinderspule

Bei einer zylinderförmigen Spule, deren Länge l sehr groß gegenüber dem Durchmesser des Querschnitts A ist, lässt sich die Induktivität folgendermaßen bestimmen:
- .
Dabei wird neben der Voraussetzung eines dünnen elektrischen Leiters der magnetische Widerstand des Außenraumes vernachlässigt und nur Rm des Kerns angenommen. Diese Gleichung gilt also ebenfalls nur in Näherung. Für kürzere Zylinderspulen existieren Approximationsformeln, die die endliche Länge der Spule und damit die „schlechtere“ magnetische Feldführung in ihrem Inneren berücksichtigen. Für eine Spule, deren Länge noch mindestens das 0,6-Fache des Radius beträgt, gilt (rw: Windungsradius):
- .
Bestimmung der Induktivität mittels AL-Wert
In der Praxis werden oft fertige Spulenkerne verwendet, für die häufig vom Hersteller eine Induktivitätskonstante AL (Al-Wert, meist in nH pro Quadratwindung) angegeben wird und dem Kehrwert des magnetischen Widerstands Rm entspricht. In diesem Wert sind bereits alle Materialkonstanten und die spezielle Geometrie der Anordnung als Näherung zusammengefasst. Wenn man den Kern mit N Windungen bewickelt, erhält man eine Spule mit der Induktivität:
- .
Feldenergie
Induktive Bauelemente wie Spulen speichern Energie in Form ihres Magnetfeldes. Das Magnetfeld einer Spule der Induktivität L, die vom Momentanwert des Stromes I durchflossen wird, enthält die Energie W:
- .
Bei einer plötzlichen Unterbrechung des Stromkreises, muss sich die in der Spule gespeicherte Energie in sehr kurzer Zeit umsetzen und ergibt an den Anschlussklemmen eine sehr hohe Selbstinduktionsspannung, die zu Beschädigungen an der Isolation oder anderen Schaltungsteilen führen kann. Um dies zu vermeiden, werden induktive Bauelemente vor dem Abschalten meist mit einem Lastwiderstand kurzgeschlossen, in dem sich die im magnetischen Feld gespeicherte Energie thermisch umsetzt. Diese hohe Spannung kann aber auch zur Versorgung von elektrischen Bauteilen mit hohem Spannungsbedarf, wie etwa einer Zündkerze, verwendet werden.
Andere Methoden zur thermischen Umsetzung bei Umschaltvorgängen sind die in Gleichspannungskreisen verwendeten Schutzdioden.
Innere und äußere Induktivität
Der Begriff äußere Induktivität wird für den Beitrag des im Raum außerhalb des elektrischen Leiters auftretenden magnetischen Flusses zur Induktivität verwendet. In obigen Beispielen zur Bestimmung der Induktivität verschiedener geometrischer Leiteranordnungen wurden die Querschnitte der elektrischen Leiter als vernachlässigbar dünn angenommen. In diesem Fall kann sich die Bestimmung der Induktivität auf die Bestimmung der äußeren Induktivität bzw. einer idealisierten Feldform beschränken.
Besitzt der elektrische Leiter (Draht) hingegen eine nicht vernachlässigbare räumliche Ausdehnung, eine entsprechende Querschnittsfläche, tritt auch eine magnetische Flussdichteverteilung innerhalb des Leiters auf. Die davon abgeleitete Induktivität wird als innere Induktivität bezeichnet. Im einfachsten Fall einer gleichmäßigen Stromverteilung über den Querschnitt des Leiters mit der Länge l lässt sich die innere Induktivität mit folgender Gleichung bestimmen:
Bemerkenswert daran ist, dass die innere Induktivität nicht von den konkreten geometrischen Abmessungen wie Durchmesser der Querschnittsfläche des Leiters abhängt. Jener Ausdruck gilt nur bei gleichmäßiger Stromverteilung, also nur bei Gleichstrom, und nur wenn die Querschnittsfläche des Leiters keine inneren Begrenzungen aufweist. Ist die Stromverteilung aufgrund des Skineffektes bei höheren Frequenzen nicht mehr gleichmäßig, ergeben sich andere, komplexere Ausdrücke für die frequenzabhängige innere Induktivität. Die inneren Induktivitäten sind wegen der Stromverdrängung im Leiter stark frequenzabhängig und nehmen mit steigender Frequenz ab.
Die innere Induktivität ist vor allem bei der Bestimmung der Gesamtinduktivität von elektrischen Kabeln von Bedeutung, da bei diesen bei niedrigen Frequenzen (z. B.: Netzfrequenz) die Leiterquerschnitte oft nicht vernachlässigt werden können.
Induktivität einer Koaxialleitung
Zur Bestimmung der Induktivität eines Koaxialkabels der Länge l (sogenannter Induktivitätsbelag) sind bei niedrigen Frequenzen die inneren Induktivitäten des inneren Leiters Lii und des äußeren Leiters Lia zu berücksichtigen. Hauptsächlich wirkt jedoch die Induktivität La des konzentrischen Raumes zwischen den beiden Leitern. Die gesamte Induktivität einer koaxialen Leitung der Länge l ergibt sich aus der Summe der einzelnen Teilinduktivitäten:
- .
Im Gleichstromfall kann für den inneren Leiter mit dem Durchmesser d obiger Ausdruck für die innere Induktivität verwendet werden:
- .
Die ebenfalls stark frequenzabhängige innere Induktivität des äußeren Leiters mit der Dicke s und den Innendurchmesser D, der als Kreisring konzentrisch angeordnet ist, kann im Gleichstromfall in guter Näherung bestimmt werden zu:
- .
Die frequenzunabhängige äußere Induktivität im Dielektrikum ist bei Koaxialleitern:
- .
Bei höheren Frequenzen, ab 10 kHz aufwärts, können die beiden Terme der inneren Induktivität wegen des Skineffektes vernachlässigt werden. Für die Bestimmung der Wellenimpedanz eines Koaxialkabels bei typischen Frequenzen ist daher nur der Summand La der äußeren Induktivität von wesentlicher Bedeutung.
Gegeninduktivität
Die Gegeninduktivität kennzeichnet die gegenseitige magnetische Einwirkung zweier oder mehrerer räumlich benachbarter Stromkreise. Sie wird auch als magnetische Kopplung bezeichnet. Die wichtigste technische Anwendung findet die Gegeninduktivität bei einem Transformator.
Nichtlineare Induktivität
Die relative Permeabilitätszahl μr hängt als Stoffkonstante nicht nur von dem jeweiligen Material ab, sondern ist bei vielen Materialien auch von der magnetischen Flussdichte abhängig. Bei hohen magnetischen Flussdichten kommt es zu einer so genannten magnetischen Sättigung der Materialien und als Folge einer Reduktion der relativen Permeabilitätszahl μr bis auf 1. Dadurch ist die Induktivität direkt von der magnetischen Flussdichte abhängig, die ihrerseits meist eine Funktion des durch die Spule fließenden elektrischen Stromes ist. Somit ändert sich die Induktivität einer Spule in Abhängigkeit vom Momentanwert des Stromes, der durch die Spule fließt.
Die Folge davon ist, dass sich die dynamische Induktivität bei sehr kleinen Aussteuerungen um den Arbeitspunkt von der statischen Induktivität unterscheiden kann. Bei größeren Aussteuerungen über die lineare Arbeitspunktnäherung hinaus, können bei nichtlinearen Induktivitäten in Wechselspannungsanwendungen zusätzliche Oberschwingungen als nichtlineare Verzerrungen auftreten. Auch sind bei Berechnungen mit nichtlinearen Induktivitäten die einfachen Methoden der (linearen) komplexen Wechselstromrechnung nicht mehr direkt anwendbar.
Die Nichtlinearität von Induktivitäten kann erwünscht sein, z. B. bei Speicherdrosseln in Schaltreglern, um diese besser an verschiedene Lastfälle anzupassen, oder in den Ablenkschaltungen von Fernsehempfängern, um dem nichtlinearen Stromverlauf in den Ablenkspulen entgegenzuwirken. Auch bei den so genannten Sättigungsdrosseln zur Entstörung von Thyristorstellern ist Nichtlinearität erwünscht.
Messgeräte
Induktivität kann nicht direkt gemessen werden. Es kann lediglich ihre Auswirkung gemessen werden.
Durch Aufschalten einer bekannten Wechselspannung und Messung des durch das induktive Bauelement fließenden Wechselstromes (oder umgekehrt) kann über die Reaktanz die Induktivität ermittelt werden. Dazu werden Amplitude und Phasenlage bestimmt. Diese Methode wird in einfachen Labormessgeräten angewandt und liefert den Induktivitätswert, die Güte sowie den Wert eines äquivalenten Serien- oder Parallelwiderstandes.
Durch Parallelschalten einer bekannten Kapazität zur Induktivität erhält man einen Schwingkreis. Ermittelt man dessen Resonanzfrequenz, kann man daraus auf die Induktivität schließen. Diese Methode ist auch ohne spezielle Geräte durchführbar und daher unter Bastlern und Amateuren weit verbreitet. Die Genauigkeit ist recht hoch.
Für hohe Genauigkeiten wird eine Messbrücke verwendet: Maxwell-Brücke. Diese Methode ist sehr genau und wird u. a. in der automatisierten Fertigung von Spulen eingesetzt.
Beim Bestimmen der Induktivitäten realer Spulen muss beachtet werden, dass je nach Spulenkonstruktion zu sehr hohen Frequenzen hin die kapazitive Kopplung der Windungen und Lagen wirksam wird. Der Impedanzverlauf steigt bis zu einem Maximalwert und bekommt Schwingkreischarakter, um zu noch höheren Frequenzen hin wieder zu sinken – die Spule stellt dann eine Kapazität dar.
Induktivität als störende Eigenschaft
Jeder elektrische Strom verursacht ein Magnetfeld (Elektromagnetismus), in dem magnetische Energie gespeichert ist. Somit besitzt jedes Stück eines elektrischen Leiters eine kleine Induktivität. Auf Leiterplatten kann als Überschlagsrechnung mit einer Induktivität von rund 1,2 nH pro Millimeter Leitungslänge gerechnet werden. Zusammengefasst ergeben diese Induktivitäten die parasitäre Aufbauinduktivität einer elektrischen Schaltung.
Die Magnetfelder nahe beieinander liegender Leiterstücke beeinflussen sich durch die magnetische Kopplung dann gegenseitig. Liegen z. B. Hin- und Rückleitung eines Stromkreises sehr eng beieinander, heben sich deren Magnetfelder gegenseitig teilweise auf, was die Gesamtinduktivität dieser Anordnung stark verringert. Daher werden oft Strompfade eng aneinander geführt und Kabel miteinander verdrillt.
Soll sich der Strom in einer induktiven Leiterschleife ändern, muss eine zur Stromänderungsgeschwindigkeit di/dt proportionale Spannung Uind wirksam sein:
- .
Häufig zum Schalten von Lasten mit induktivem Verhalten benutzte Schalter und Relais weisen deswegen deutliche Abnutzungsspuren an den Kontakten auf, die deren Funktion stark beeinträchtigen können: beim Abschalten fließt der Strom aufgrund der Induktivität weiter und bildet einen Lichtbogen (siehe Schaltlichtbogen), in den sich die in der Induktivität gespeicherte Energie entlädt. Noch kritischer sind Stromflussänderungen, die durch Halbleiterschalter hervorgerufen werden. Halbleiterbauteile werden von derart hohen Spannungen oft zerstört. Daher muss bei der Konstruktion von Schaltungen mit hohen Stromänderungsgeschwindigkeiten auf einen niederinduktiven Aufbau geachtet werden. Zusätzlich werden häufig Snubber-Netzwerke am Halbleiter angebracht. Falls möglich und nötig, werden auch Freilaufdioden benutzt. Neuere Halbleiterschalter können oft auch ohne Schutzbeschaltung induktive Lasten schalten, indem der Energieabbau in einem kontrollierten Avalanchedurchbruch erfolgt.
Ein weiteres Problem parasitärer Induktivitäten ist die Interaktion mit parasitären Kapazitäten. Der dadurch entstandene Schwingkreis kann störende Spannungsschwingungen erzeugen, die Halbleiterbauteilen schaden können und die Elektromagnetische Verträglichkeit und die Signalübertragungseigenschaften verschlechtern.
In Computern kann sich der Strombedarf einzelner Integrierter Schaltkreise im Nanosekundentakt ändern. Weil das einer Frequenz im Gigahertzbereich entspricht, kann die Induktivität der Stromversorgungsleitungen nicht ignoriert werden, auch wenn sie nur wenige Zentimeter kurz sind. Der induktive Widerstand des Drahtes vergrößert den Innenwiderstand der Spannungsquelle mit steigender Frequenz ganz erheblich. Als Folge kann die Spannung bei Stromänderungen beispielsweise zwischen 2 V und 10 V schwanken und den IC stören, möglicherweise sogar zerstören. Als Gegenmittel werden induktionsarme Kondensatoren unmittelbar an die IC-Anschlüsse gelötet, die einen sehr geringen dynamischen Innenwiderstand sicherstellen.
Literatur
- Frederick W. Grover: Inductance Calculations: Working Formulas and Tables. Reprint Auflage. Dover Publications, New York 1952.
- Karl Küpfmüller, Gerhard Kohn: Theoretische Elektrotechnik und Elektronik. Eine Einführung. 14. Auflage. Springer-Verlag, Berlin 1993, ISBN 3-540-56500-0.
- Otto Zinke, Heinrich Brunswig: Hochfrequenztechnik I. Hochfrequenzfilter, Leitungen, Antennen. 5. Auflage. Springer-Verlag, Berlin 1995, ISBN 3-540-58070-0.
- Howard Johnson: High-Speed Digital Design. Prentice-Hall, New Jersey 1993, ISBN 0-13-395724-1.